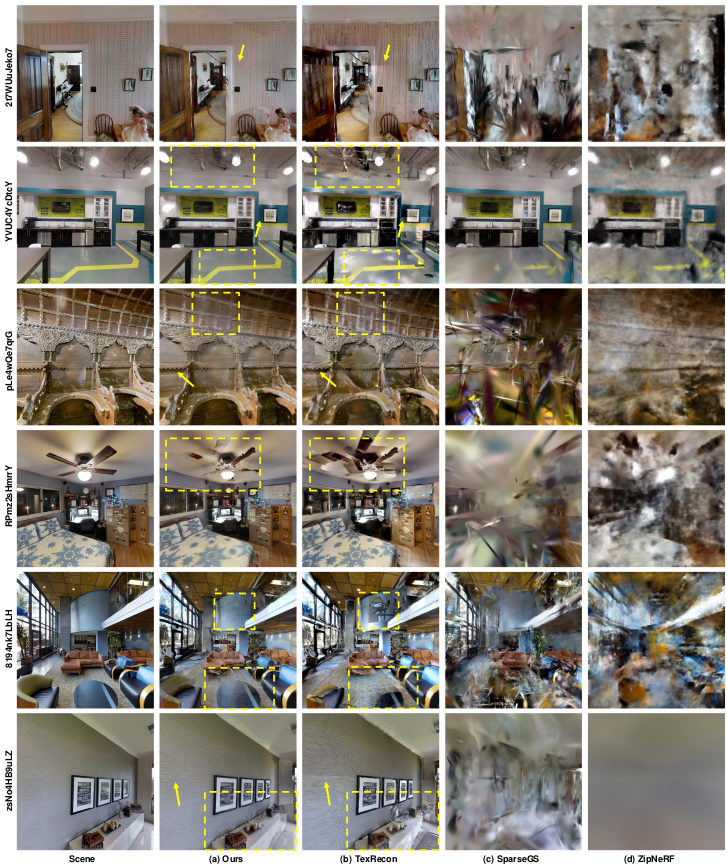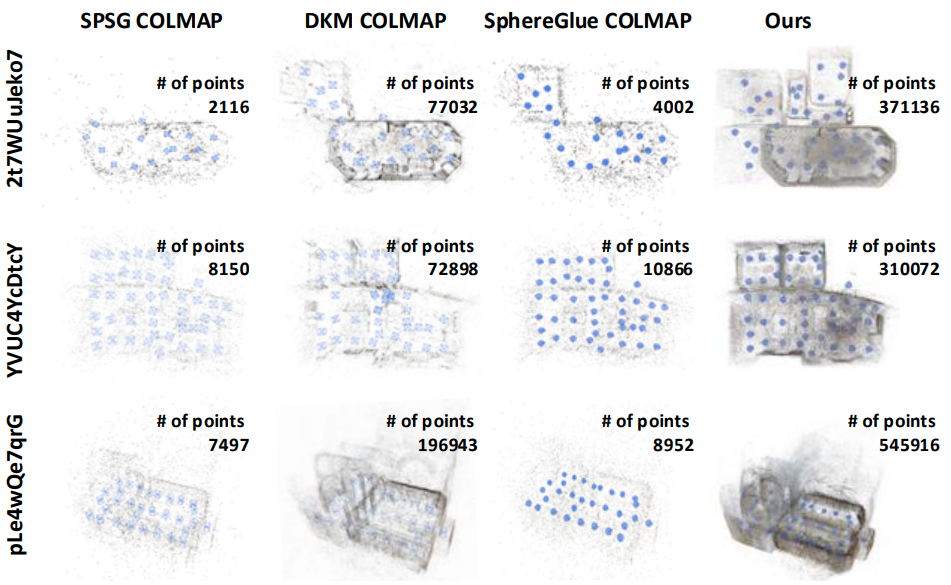
 2t7WUuJeko7
2t7WUuJeko7
|
 pLe4wQe7qrG
pLe4wQe7qrG
|
 RPmz2sHmrrY
RPmz2sHmrrY
|
 YVUc4YcDtcY
YVUc4YcDtcY
|
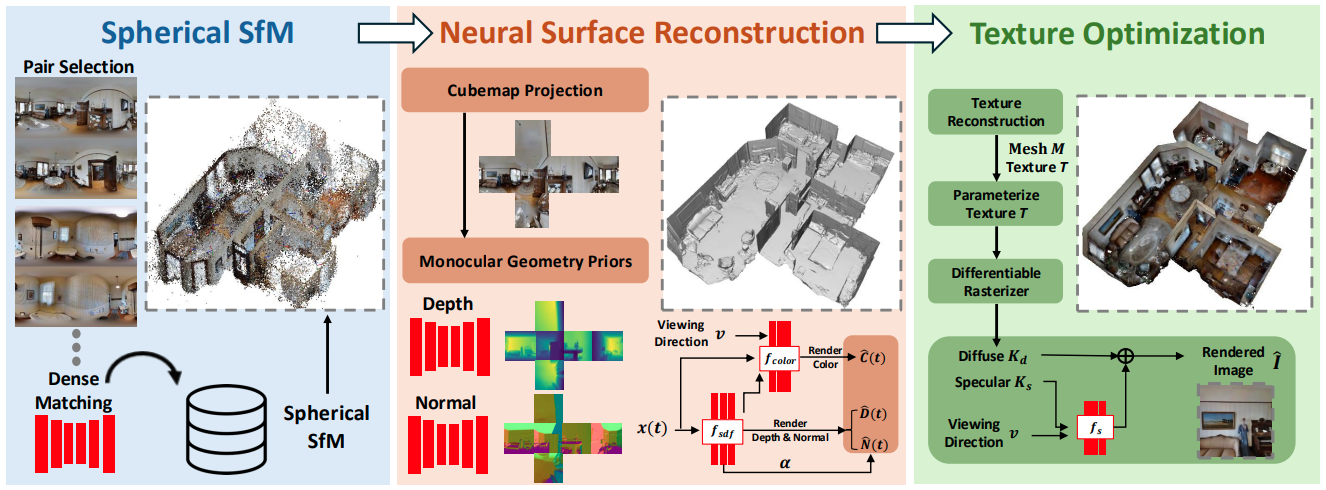
Please note that the reconstructed mesh has been compressed to enable a smooth in-browser experience. We decimated 50% of the mesh triangles. Thus, the visual quality is slightly degraded compared to the visual results. ⚠️ If the renderer does not work properly, please press Ctrl + Shift + R to force-refresh the page. You may also open the Developer Console (F12) and check the logs — sometimes the viewer loads after a short delay.